The purpose of MASSA is to develop new security systems that will enable smart autonomous devices to communicate in a secure manner while maintaining the authenticity, integrity and confidentiality of messages and information exchanged.
The objectives of the project are:
I. Development of a PKI system addressed to intelligent transport systems (C-ITS) in order to authorize the access of vehicles to various V2X communications infrastructure and security services.
The proposed system must cover the functional / safety requirements imposed by the recently issued standards and norms at European level. Within the project we aim to design and develop the system up to the prototype stage.
II. Development of technical components for the extension of the PKI system proposed in the first objective to be compatible with other categories of autonomous systems:
a. Drone like systems. The project aims to find technical solutions to extend the PKI architecture defined at the first objective in order to secure the communication protocols used in drones. The security requirements for drone-specific communication protocols, the security elements proposed by the literature in the field and the degree of their implementation at the level of existing implementations will be investigated.
The possibilities and limitations of using the defined certificate formats for ITS (V2X) communications in the case of communication protocols used by drones will be investigated.
b. Intelligent systems based on IoT sensors currently used in smart home implementations.
The project will analyse the possibilities of adapting the communication protocols specific to these systems and the introduction of a security level based on digital certificates, similar to those proposed for V2X infrastructures, through which interaction with other similar systems or access to specific infrastructure services and applications can be authorized in a controlled manner.
III. Using data science for transport planning and traffic optimization. The following are considered:
a. Identify the optimal ways to place specialized sensors in the infrastructure to identify blockages.
b. Implement vehicle synchronization techniques to achieve a common goal (e.g. traffic optimization).
c. Investigate the possibilities of using methods from decision and social choice theory to obtain a complex and robust automatic traffic management system.
Description of the project phases. Objectives of the phases. Activities necessary to achieve the objectives
Phase 1 – Technical studies on security services for autonomous systems
Timeframe: 07.09.2020 – 18.12.2020
Phase objectives:
Conducting an analysis regarding the status of the standards and regulations on the security of autonomous systems, identifying the security, functional and procedural models regulated.
Conducting an analysis regarding the status of the existing PKI solutions on the market for ITS, drone and IoT systems.
Conducting an analysis regarding the efficiency of traffic optimization methods and techniques using sensors placed in the infrastructure and Machine Learning algorithms, while maintaining the privacy of traffic participants.
Description of the activities necessary to achieve the objectives
Study on existing standards and regulations in the field of autonomous systems security.
Study on the status of technological development of PKI solutions for autonomous systems.
Study on current techniques for traffic optimization using machine learning algorithms.
Development of business cases for issuing and using certificates in intelligent transport systems.
Development of business cases for the issuance and use of certificates in drones and IoT systems.
Definition of the technical requirements for PKI systems related to intelligent transport systems.
Phase deliverables
Research report on the status of standards in the field of autonomous systems security.
Research report on the existing PKI technologies and implementations for autonomous systems such as ITS, drone, IoT.
Research report on proposed methods for traffic optimization using infrastructure information and ML algorithms.
Phase 2 – Definition of the technical requirements regarding the PKI system for intelligent transport systems and development of the reference architecture. Ethics.
Timeframe: 19.12.2020 – 31.05.2021
Phase objectives: Development of the reference infrastructure of the PKI system used in intelligent transport systems.
Development of the reference infrastructure of the PK system for drones, sensors and IoT.
Carrying out the case reference of the traffic optimization model.
Investigating ethical issues, processing of personal data.
Development of business cases for the issuance and use of certificates in intelligent transport systems, in drone and household IoT systems, which will consider existing standards, analysis of existing infrastructures.
Definition of technical requirements for PKI systems proposed for autonomous systems. The business cases from the previous activity will be considered, and the technical requirements obtained will be the basis for establishing the system architecture.
Development of business cases and requirements for the traffic optimization model using sensors in the infrastructure. Several scenarios for the use of sensors in the infrastructure will be followed and the possibilities of using ML type algorithms will be considered.
Description of the activities necessary to achieve the objectives
Developing the reference infrastructure of the PKI system for intelligent transport systems.
Developing the reference infrastructure of the PKI system for drones and IoT sensors.
Developing the reference infrastructure of the traffic optimization model.
Investigating ethical issues, processing of personal data.
Defining business cases for the issuance and use of certificates in intelligent transport systems.
Defining business cases for the issuance and use of certificates in drones and IoT sensors.
Establishing the technical requirements for the PKI system implemented in intelligent transport systems.
Establishing the technical requirements for the PKI system implemented in drones and IoT sensors.
Defining business cases and requirements for the traffic optimization model based on sensors placed in infrastructure.
Phase deliverables
The architecture of the PKI system for intelligent transport systems.
The architecture of the PKI system for drones and household IoT sensors.
The architecture of the traffic optimization model
Business cases
Technical requirements for the systems
Technical report on resolving ethical and GDPR issues.
Phase 3 – Prototype development, testing and validation
Timeframe: 01.06.2021 – 17.12.2021
Phase objectives
Prototype development
Prototype testing and validation
Description of the activities necessary to achieve the objectives
Development and testing the PKI system prototype for intelligent transport systems.
Development and testing the PKI system prototype for drones and household IoT sensors.
Validation of prototypes in real use conditions.
Phase deliverables and deadline
The PKI system prototype for intelligent transport systems.
The PKI system prototype for drones and household IoT sensors.
Testing plan for the PKI system prototypes developed.
Test report for the PKI systems developed.
Phase 4 – Technological transfer of experimental development outcomes and dissemination of results
Timeframe: 18.12.2021 – 30.05.2022
Phase objectives
Dissemination of the project outcomes to end users without technical knowledge and to specialists and experts.
Dissemination of project outcomes to end users without technical knowledge and to specialists and experts.
Protecting intellectual property rights over developed components, systems, and applications.
Elaboration of presentation materials for marketing purposes of the developed systems.
Description of the activities necessary to achieve the objectives
Dissemination of project outcomes and marketing activities
Protection of the intellectual property rights
Elaboration of presentation materials for marketing purposes
Phase deliverable
Three scientific papers published and presented in journals or in conferences indexed in BDI / ISI
Certificate of registration with ORDA of intellectual property rights
Brochures, website presenting the characteristics of the platforms obtained in the MASSA project
Project outcomes
The main objective of the project MASSA carried out by CERTSIGN in partnership with the Military Technical Academy and the University of Bucharest was the development and implementation of a scalable and flexible PKI system, addressed to intelligent transport systems in order to secure V2X communications (vehicle to everything) and authorizing vehicle access to various infrastructure services. The PKI system developed, whose trade name is c-itsSAFE also covers the functional and security requirements imposed by the standards and norms issued lately at European level.
Architecture of the PKI c-itsSAFE system developed under the MASSA project
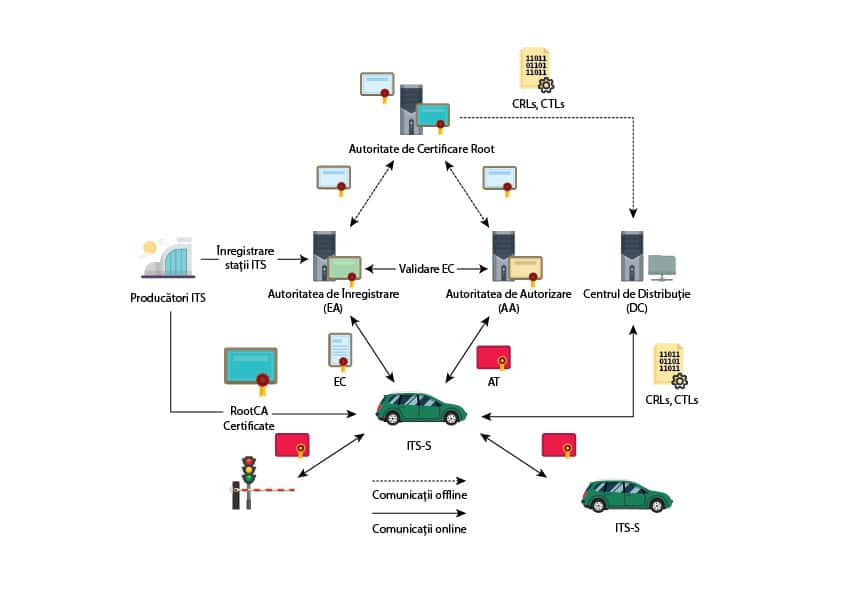
The PKI system for Intelligent Transport Systems is intended to provide the necessary technological elements to enable smart devices to communicate in a secure manner, ensuring the authenticity, integrity and confidentiality of messages and information exchanged. The digital certificates issued to the C-ITS actors (vehicles, infrastructure elements, etc.) are used to identify each component and to ensure secure access of each system actor to traffic information.
For the development of the c-itsSAFE system, the principle of “privacy by design” has been applied and the following key attributes have been implemented to ensure the protection of its actors:
- Anonymity
- Pseudonymity
- Unlinkability, and
- Unobservability
Components developed:
- Root Certificate Authority (Root-CA sau RCA) – CA of the highest level of certification hierarchy, used for the generation and management of keys and higher-level trust certificates.
- Enrolment Authority (EA or LTCA) – the “entry” point in the PKI system, used by the manufacturers of ITS stations to make the enrollment of information about each station produced.
- Authorization Authority (AA or PCA) – the PKI system component at the level of which the authorization tickets (AT) issued for ITS stations are managed, based on requests issued by them.
- Distribution center (DC) – used by ITS stations (ITS S) to retrieve the CRLs (Certificate Revocation List – contains information about revoked certificates at PKI system level) and the CTLs (Certificate Trust List – contains information about CA certificates issued by Root CA) published by Root CA.
The developed PKI system is compatible with:
- C ITS certification policy (Annex 3 to the Commission Delegated Regulation supplementing Directive 20100/40/EU of the European Parliament and of the Council with regard to the deployment and operational use of cooperative intelligent transport systems, no. C(2019)1789);
- ETSI TS 102 941 Standard v1.4.4;
- ETSI TS 102 940 Standard v1.3.1;
- ETSI TS 103 097 Standard v1.4.1;
- IEEE 1609.2 Standard.
